|
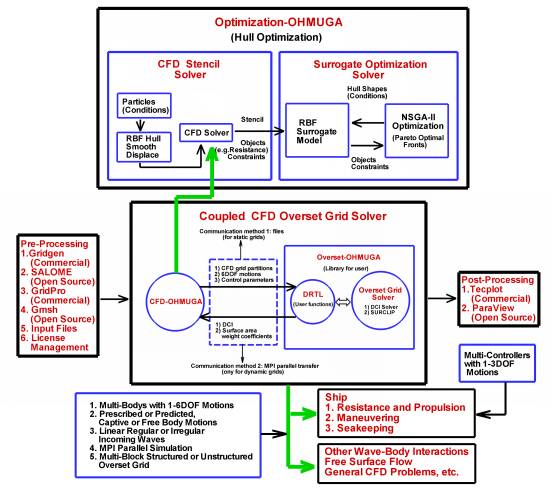
There are three products:
CFD-OHMUGA, Overset-OHMUGA and Optimization-OHMUGA. The first is CFD solver,
the second is
dynamic overset grid solver serving for CFD solver, both of these two solvers can run
independently or couple together. The third is optimization
solver working for ship hull optimization using CFD results and
surrogate model.
CFD-OHMUGA is
a copyrighted, unstructured grid, MPI parallel, CFD viscous flow solver
developed with world leading-edge numerical methods and multi-functions,
which is designed to provide reliable simulation methods and tools for the
researches and engineering designs about complex, challenged and new
marine hydrodynamics and aerodynamic problems, addressing for fast, robust and accurate computation.
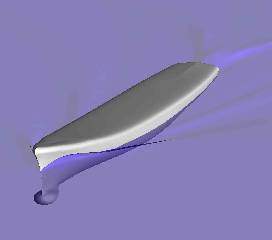
CFD-OHMUGA is designed to
simulate broad CFD problems, especially marine hydrodynamics (or
aerodynamics) problems, such as ship resistance and propulsion
(autopilot), maneuvering (e.g. zigzag using propeller and rudder
controllers), seakeeping (e.g. pitch-heave, course-keeping in waves),
etc. for single or group of ships. Thanks for the powerful function of
dynamic overset grid solver, it can deal with the problems of relative
motions, very complicated geometries (wing, fin, skeg, bilge keel,
etc.), and refinement grids.
CFD-OHMUGA has three versions,
Version 1 can predict free surface flow using parallel unstructured grid method,
Version 2 is implemented with the new function
of 6DOF by solving rigid body dynamic equations, version 3 is a coupled
solver of CFD and overset grids solvers (coupled with Overset-OHMUGA). The latest version
is making the coupled parallel
computation and prediction for fluid flow, free surface, body forces,
moments, and 6dof motions (captive or free-body) and controllers, for
fluid-body (or wave-body) interaction problems, of multi-bodies
(floating or submerged bodies) with independent 6dof motions and their
multi-appendages (controllers) with independent motions (rotation along
an axis, or 3dof rotations).
Main
models:
Inertia or non-inertia coordinate systems; Single-phase
incompressible viscous flow; Free surface model including level
set transport and reinitialization model; RANS (BSL, SST) and DES
turbulence models; Multi-body (1-6DOF
motions) and multi-appendage (1-3DOF rotations) rigid body dynamic
models; Incident linear regular or
irregular waves; Body force propeller model; Linear mooring model;
Active controllers for autopilot, heading control, etc.
Main
numerical methods: Dynamic
unstructured overset grids constructed by either multi-block,
body-fitted, non-orthogonal curvilinear structured grids (automatically
transformed to unstructured grid formation), or normal unstructured
grids with four(4) different kinds of hybrid elements (tetrahedral,
hexahedral, prismatic and pyramidal elements); Collocated grid (all
variables are set at nodes based on element vertexes); Finite Volume
(median-dual scheme); Projection or PISO method for velocity and
pressure coupling; 2nd-order Implicit method for temporal and spatial
discretization for momentum and level set governing equations to apply
big time step; Upwind edge-conformed method, or line-extension method of
shape function interpolation for fiction node in a tetrahedral element
for convection term discretization; Limiter functions for convection
term discretization (venkatakrishnan or barth jesperson limiter, or TVD
method of Roe's minmod, Roe's superbee, van Albada, Van Leer, etc.); An
option of variable gradient calculation based on local fiction
orthogonal coordinates; Shape function (iso-parameter) interpolation
method is used for discretization for the poison equation; Far distance
water fiction points and fiction elements method for accurately
calculating pressure gradient near free surface.; Narrow Band and
Geometry method for level set equations (to keep fast calculation and
accuracy in skewed grids); KD-Tree fast search and geometry method for
calculating distance of close points for level set reinitialization;
Efficient and compact stencil numerical treatments for pressure equation
for hexahedral elements; Multi-body (object) 1-6DOF motions; Earth
coordinate and body-fixed coordinate switch; ALE for grid motion;
Multi-body forces, moments and motions are computed independently;
multi-layer refinement overset grids can be set flexibly to follow all
or part of body motions; Implicit method for time evolution for
predicting 1-6DOF motions; Multi-appendages (controllers); Euler angle
methods for 1-3DOF appendage rotations which is independent from body
motions; Calculate motions in earth system by Composting the appendage
1-3DOF motions with their parents’ 1-6DOF body motions; HPC (High
performance computation) of MPI parallel computation.
Overset-OHMUGA is a
copyrighted, domain composition, MPI parallel, unstructured, dynamic
overset grid solver for providing DCI (Domain Connectivity Information)
and surface area weight coefficients for different CFD solvers (CFD-OHMUGA
or others). Overset-OHMUGA is a library provided for CFD solvers, who
includes two different solvers: one is DCI (Domain Connectivity
Information) solver, another is named as SURCLIP used to calculate
surface area weight coefficients in order to generate an integral area
for calculating force or moments on a rigid body. Overset-OHMUGA also
provides a library DRTL (Donor Receptor Transaction Library) constructed
by different kinds of functions used to communicate information with CFD
solvers in MPI parallel way while the coupled solver is used.
Main methods used in Overset-OHMUGA:
1) a new efficient method named Iterative Band Algorithm (IBA) for
hole cutting is suggested . 2) Automatic process, watertight band, no grid
hierarchies, no auxiliary geometries, no protected elements near
boundaries. 3) Multi-level fringe nodes. 4) Multi-level appendages. 5)
Efficient searching method. 5) Orphan nodes treatment by average method.
Optimization-OHMUGA is an
optimization solver (independent from the CFD solver) used for ship hull shape optimization for
multi-objects. It is constructed with two sub-solvers, one is CFD
stencil solver, another is surrogate optimization solver. Wherein the
former firstly uses CFD solver to calculate objects (e.g. ship
resistances) and constraints (e.g. ship displacements) under the
conditions of typical ship hull shapes, thus provides basic data
stencils for latter usage. The latter then secondly performs the
optimization process using a surrogate method based the data stencils.
In Optimization-OHMUGA solver, NSGA-
II
method is suggested for calculating multi-objects and multi-constraints
optimization, RBF (Radial Basis Function) method is advised for
calculating grid displace, and RBF surrogate model is used for
interpolating the variables based on stencils provided by CFD solver.
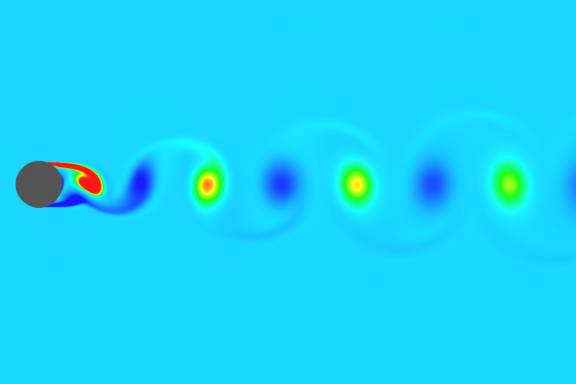
The
CFD codes have been validated or demonstrated with different and
necessary examples of marine hydrodynamics, including cases of 2D or 3D,
laminar or turbulence flow, steady or unsteady, with or without free
surface, forces, moments and motions, multi-body and multi-controllers,
etc.
OHMUGA
products are convenient to use. The users are required to set
parameters in input files (user interface), and a grid file (or an
additional boundary condition file if that is not included
in the grid file), wherein, the formations of grid files (or boundary
condition file) are compatible to Gridgen or FIELDVIEW, and output file formations
are compatible to formation of Tecplot. Special design is possibly
provided according to user's special formations.
In
addition, Fortran and c compilers, MPI and PETSc should be
pre-installed.
|
 Fluid
Dynamics Inc.
Fluid
Dynamics Inc.